
Mehrkörpersysteme (MKS)
Die Untersuchungsmethoden für mechanische Systeme mit Mehrkörpermodellen entstanden Ende der 60er und Anfang der 70er Jahre durch die Anforderungen aus dem Bereich der Raumfahrt.
Durch die Entwicklung in der Fertigungstechnik in den 70er Jahren wurden die Berechnungsmethoden für die Untersuchung von Manipulatoren stark verbessert und erweitert.
In den folgenden Jahren wurden viele Forschungsprobleme gelöst und eine bedeutende Anzahl von MKS-Formalismen entwickelt.
Weitverbreitet sind heutzutage dynamische Berechnungen von Mehrkörpersystemen in der:
-
Fertigungstechnik
Untersuchungen von Manipulatoren
-
Fahrzeugtechnik
Lenkverhalten, Bremsen, Schleudern, etc.
-
Rotordynamik
Untersuchung von Gaszentrifugen,
Untersuchung von Wasserkraftmaschinen
-
Biomechanik
Schutzvorrichtungen für Fahrzeuginsassen,
Analyse von Gehmaschinen
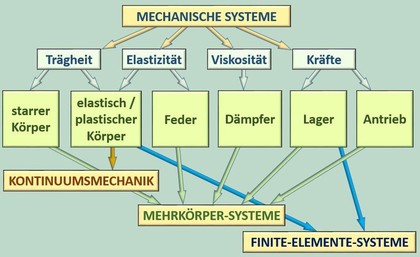
Für die Beschreibung eines mechanischen Systems als Mehrkörpersystem werden die Eigenschaften anders als bei den Kontinuierlichen Systemen oder Finite-Elemente-Systeme direkt einzelnen Elementen zugewiesen. Die Trägheit wird mit Hilfe von starren Körpern abgebildet, Elastizität über Federn, Viskosität über Dämpfer und die Kräfte durch Lagerreaktionen und Antriebskräften.


Montagevorgang

Schwingungsanalyse

Unfallbelastung
Bauteilversagen

Einsturzvorgang